Obin Kwon (권오빈)

Hi! I'm a Sr. Robotics Machine Learning Engineer in Tesla Optimus team. I'm interested in robot learning with vision and multimodal perception for embodied AI. Below is my academic and professional career timeline:
Research Keywords : Embodied AI, Robot Learning 🤖 with Computer Vision 👀, Machine Learning🧠
My interests are lie in translating multimodal environmental information into effective robot action policies . Previously, I focused on developing novel scene representations from vision signals and creating robot policies that effectively use these representations to perform high-level tasks. Looking forward, I am enthusiastic about exploring a wide spectrum of new frontiers in robotics, encompassing multi-modal perception, human-robot interaction, and advanced decision-making processes.
News
| Nov, 2025 | PAPRLE is accepted for publication at RA-M. |
|---|---|
| Oct, 2025 | I start working at Tesla as a Sr. Robotics Machine Learning Engineer. Excited for this new chapter! |
| Jul, 2025 | CHILD is accepted to Humanoids 2025! |
| Jul, 2025 | PAPRLE and PAPRAS are released as open-source! |
| Mar, 2025 | We presented Ringbot and PAPRAS teleoperation system at the Amazon MARS conference. |
| Mar, 2025 | I serve as an area chair for CORL 2025. |
| Aug, 2024 | 🎓 I received the Distinguished Ph.D. Dissertation Award from ECE, Seoul National University! 🎓 |
| Jul, 2024 | I started my role as a postdoctoral research associate in KIMLAB@UIUC, working with Joohyung Kim. |
| Jun, 2024 | Our paper “RNR-Nav: A Real-World Visual Navigation System Using Renderable Neural Radiance Maps” is accepted to IROS 2024, as oral presentation. |
| Jun, 2024 | I successfully defended my Ph.D Thesis! |
Publications
- CHILD (Controller for Humanoid Imitation and Live Demonstration): a Whole-Body Humanoid Teleoperation SystemIn 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids), 2025TeleoperationHumanoid
- PAPRLE (Plug-And-Play Robotic Limb Environment): A Modular Ecosystem for Robotic LimbsIn arXiv, Jul 2025TeleoperationManipulation
-
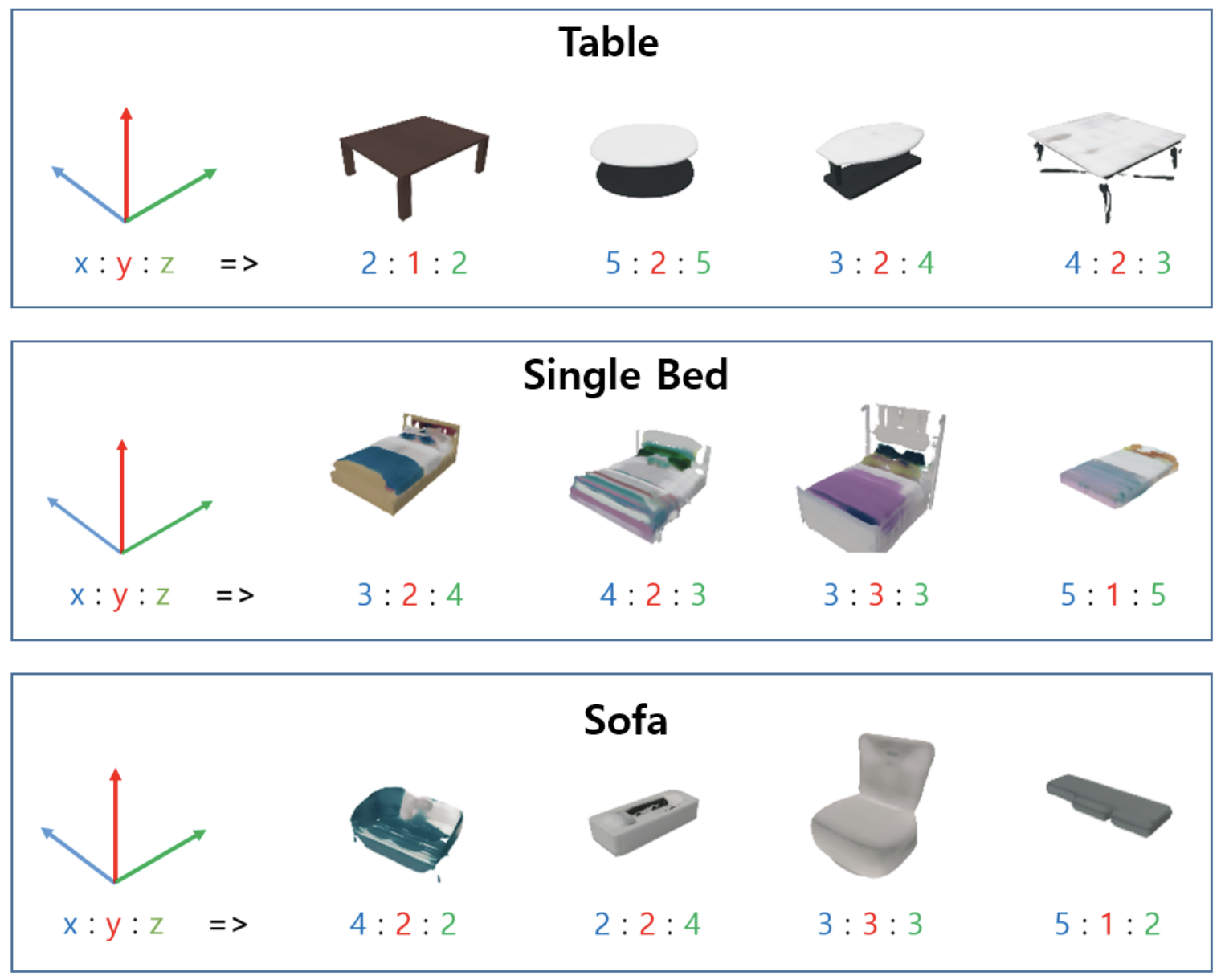 Spatially-Conditional 3D Furniture Generation Model for Indoor Scene GenerationIn 2024 24th International Conference on Control, Automation and Systems (ICCAS), Oct 2024Scene RepresentationScene Generation
Spatially-Conditional 3D Furniture Generation Model for Indoor Scene GenerationIn 2024 24th International Conference on Control, Automation and Systems (ICCAS), Oct 2024Scene RepresentationScene Generation - WayIL:Image-based Indoor Localization with Wayfinding MapsIn 2024 International Conference on Robotics and Automation (ICRA), May 2024Scene RepresentationVisual Localization
-
 Attention-Based Randomized Ensemble Multi-Agent Q-LearningIn 2023 23rd International Conference on Control, Automation and Systems (ICCAS), Jun 2023Multi-AgentReinforcement Learning
Attention-Based Randomized Ensemble Multi-Agent Q-LearningIn 2023 23rd International Conference on Control, Automation and Systems (ICCAS), Jun 2023Multi-AgentReinforcement Learning - Visually Grounding Language Instruction for History-Dependent ManipulationIn 2022 International Conference on Robotics and Automation (ICRA), 14–18 dec 2022ManipulationMemory BuildingLanguage Instruction
-
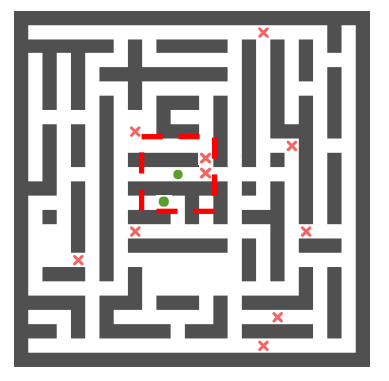
 Geometric Understanding of Reward Function in Multi-Agent Visual ExplorationOct 2021Multi-AgentReinforcement LearningVisual Navigation
Geometric Understanding of Reward Function in Multi-Agent Visual ExplorationOct 2021Multi-AgentReinforcement LearningVisual Navigation -
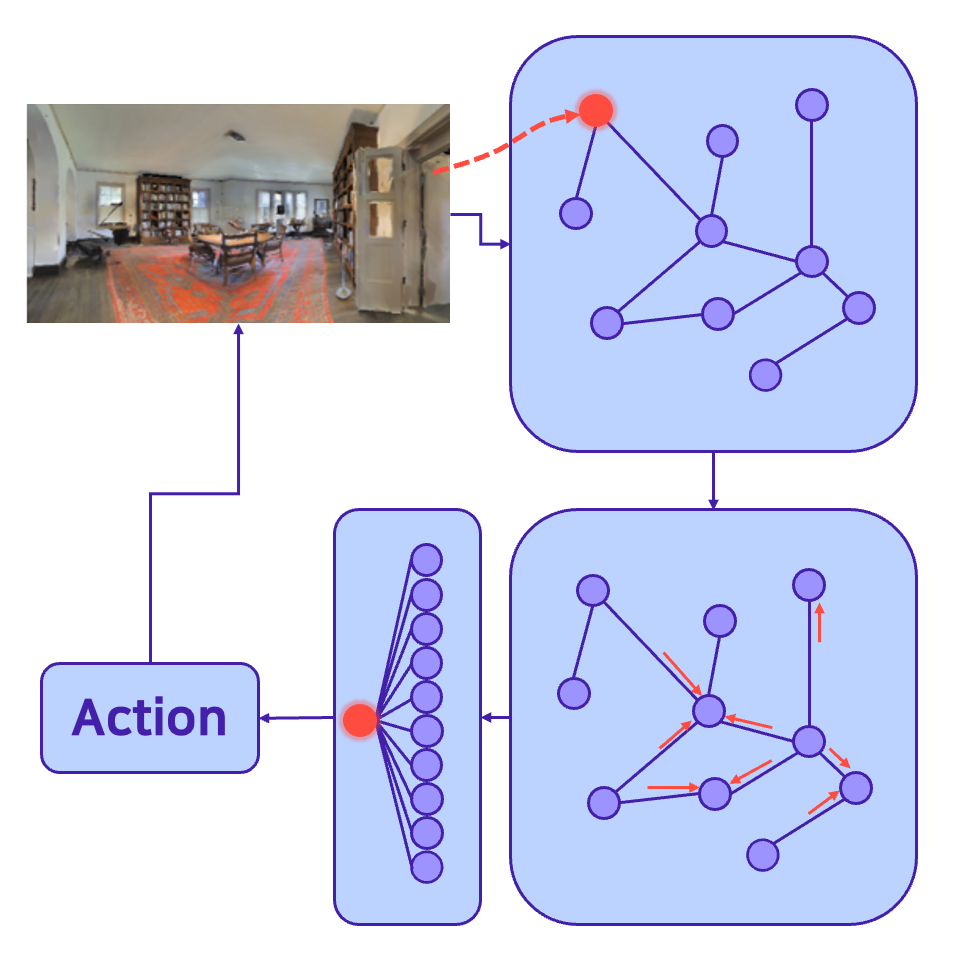 Image-Goal Navigation Algorithm using Viewpoint EstimationIn 2021 21st International Conference on Control, Automation and Systems (ICCAS), Oct 2021Visual NavigationMemory BuildingReinforcement Learning
Image-Goal Navigation Algorithm using Viewpoint EstimationIn 2021 21st International Conference on Control, Automation and Systems (ICCAS), Oct 2021Visual NavigationMemory BuildingReinforcement Learning



